Tags
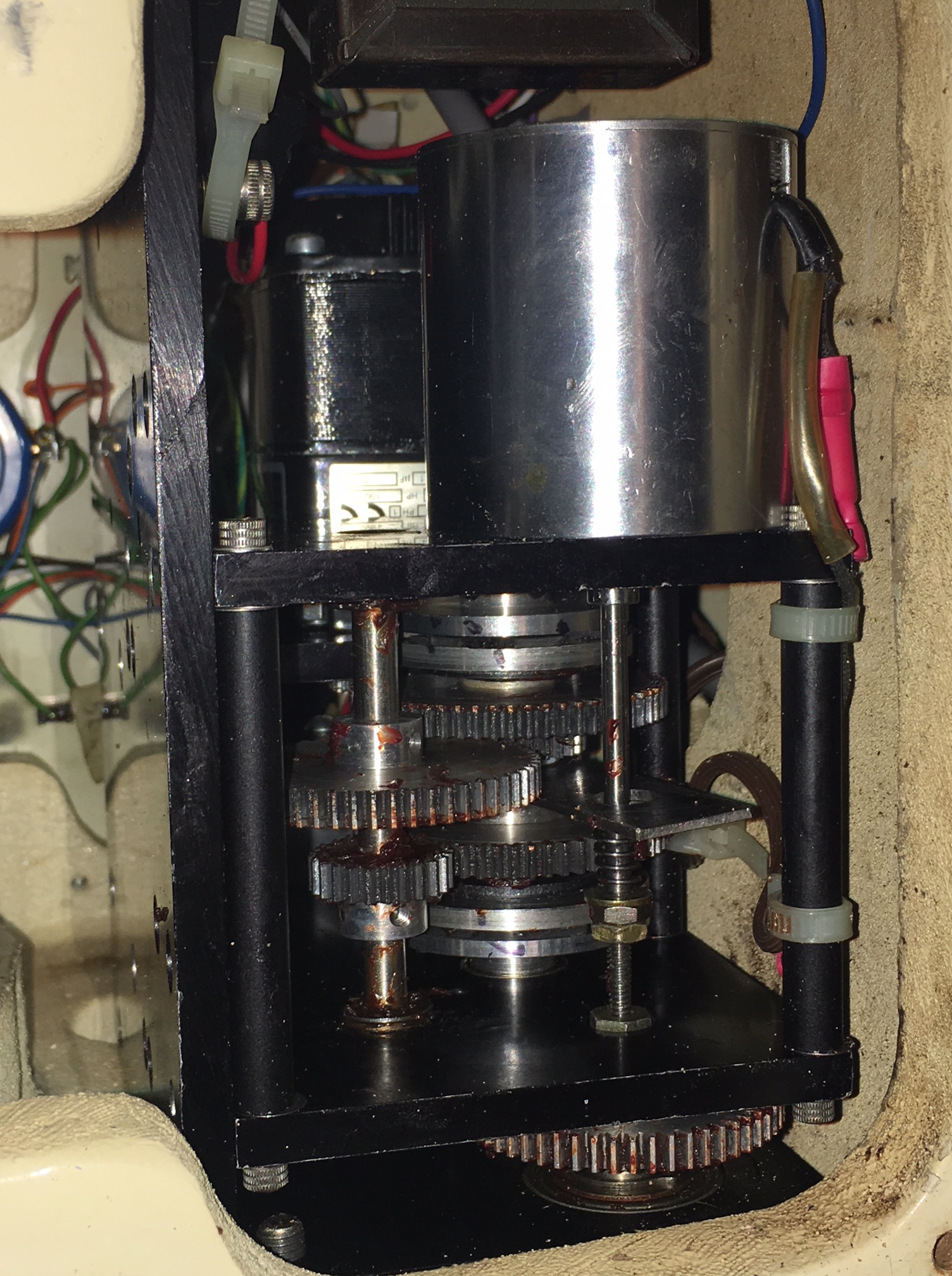
Here is a photo of the inside of the declination axis of the Ealing mount at Hopewell Observatory.
The gears you see were made about 50 years ago by the Ed Byers company, who continue to produce some of the finest gears anywhere. The periodic error on this mount is very, very low, which is a Good Thing, and why we want to keep it and just upgrade the old drive. As you can see in a previous post, the old system had a finicky clutch drive that had caused a lot of problems, but worked very well indeed when it worked properly.
I am working to replace it with a more modern, reliable and user-friendly, namely an OnStep ‘build’.
The friendly and helpful folks at the OnStep project were asking for a picture showing how the existing Byers drive was put together. I hope these four photos help.
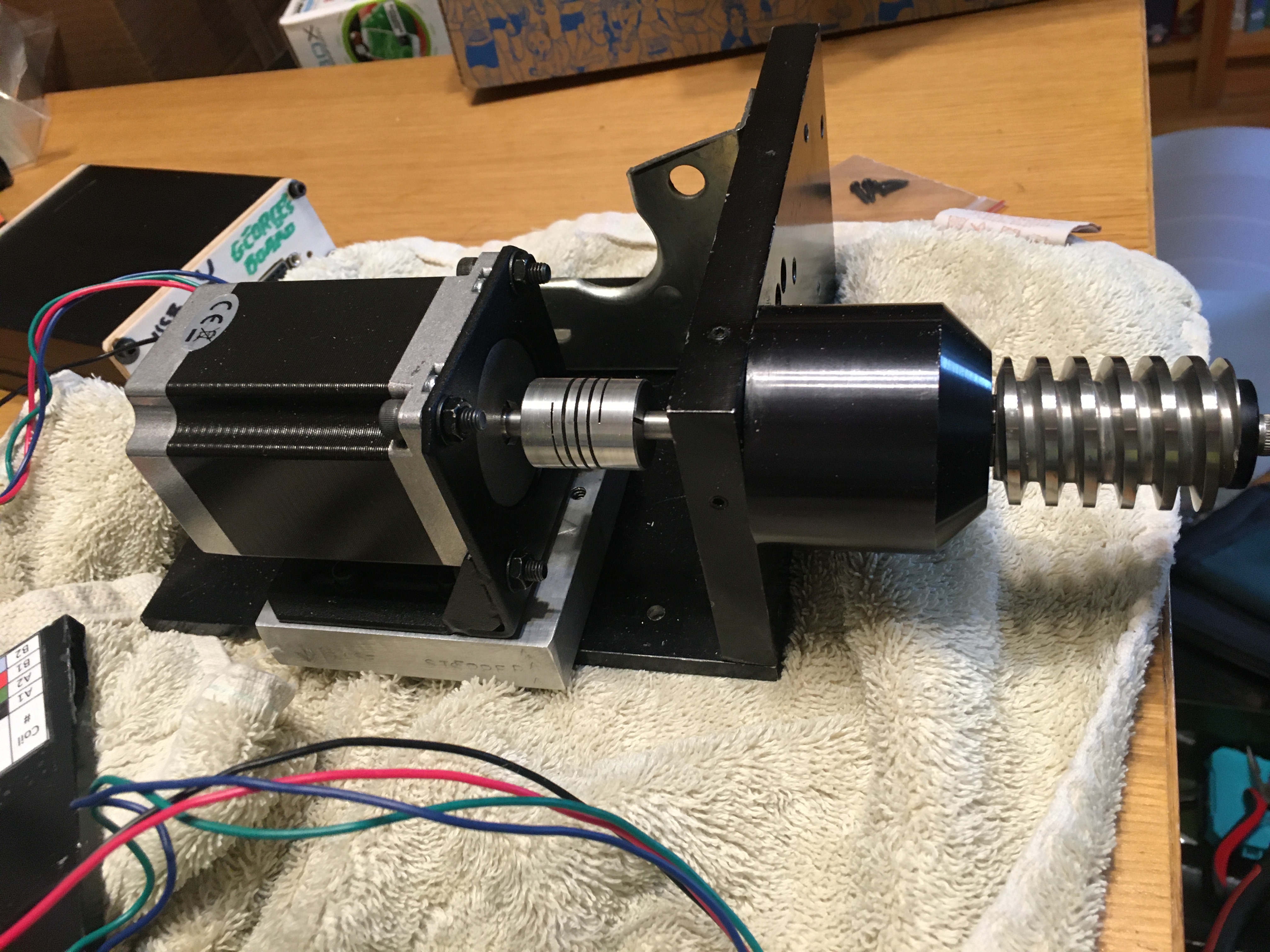
In the first photo, notice the greasy worm gear at the bottom left. It was removed from the mount, along with the old motors, and is sitting on my desk (with the old grease cleaned off), directly coupled to the stepper motor, which connects to one of the OnStep boards (in the wood-and-black aluminum box). In the second photo,
The black anodized bracket in the second photo holds the motor and the worm gear rigidly together. The bracket bolts into a place in the mount (not shown). It took a bit of work to get the stepper motor and the worm gear lined up within a couple of thousandths of an inch, but it’s done. Prasad turned me onto those cool little universal joints that permit one to connect items that don’t match perfectly.
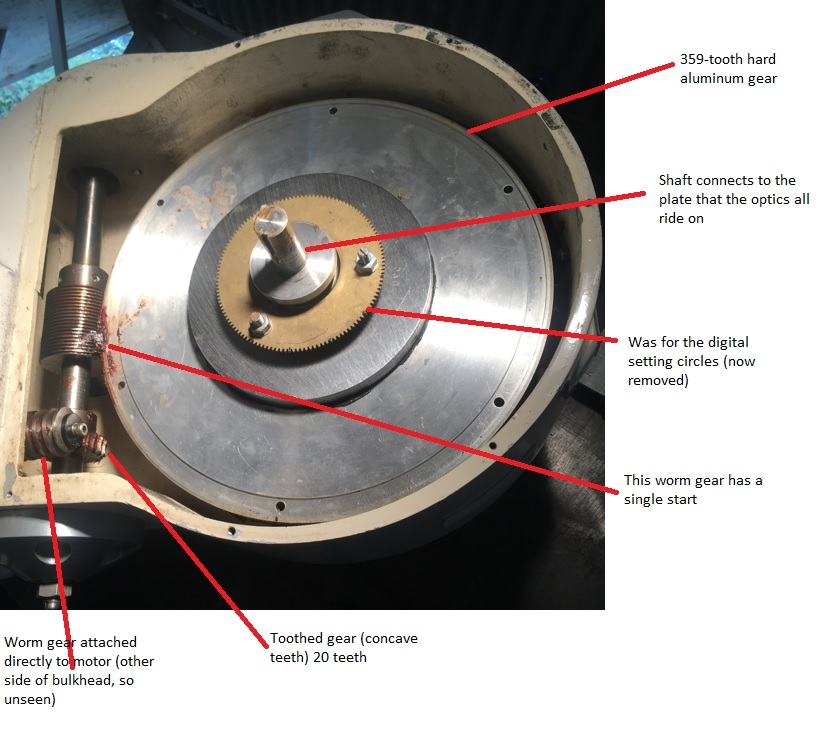
20 turns of the worm gear, times 359 teeth on the big gear, means that it takes 7,180 turns of the stepper motor to make one full revolution of this declination axis or of the right ascension axis, which is identically mounted. (Not that you would want to go about spinning your telescope very far on either axis!)
So 19.97 turns of either motor make the scope travel 1 degree (7180 divided by 360).
And since our stepper motors make 200 steps in one revolution of the worm gear, it takes about 3994 motor steps to make the scope turn by that one degree (the last result, times 200).
Or if you are micro-stepping by, say, the rate of one sixteenth of a step, then by my calculations it will take 63,911 microsteps to turn by that degree (the last result, times 16). And that seems to be outside the range of permissible microsteps for these stepper motors, perhaps causing them to scream in protest. (I swear, that’s what it sounds like!)
It appears that Khaled and Prasad might be correct: I might need to add a toothed gears and a belt to this arrangement to reduce that last number (63,911) by some factor. For very little money I just ordered a pair of such things, designed for 3-D printers and other computer-controlled machines. It will have 60 teeth on the motor and 20 teeth on the worm gear, and then the above would instead have only 21,304 microsteps to turn one degree. (No wonder they protest!) Once again I’ll have to disassemble the motor and drive bracket and do a bit of machining. A drill press and a punch will be fine.
The last two photos give some more detail on how the old drive system worked.